Pathfinder A* for CS4710
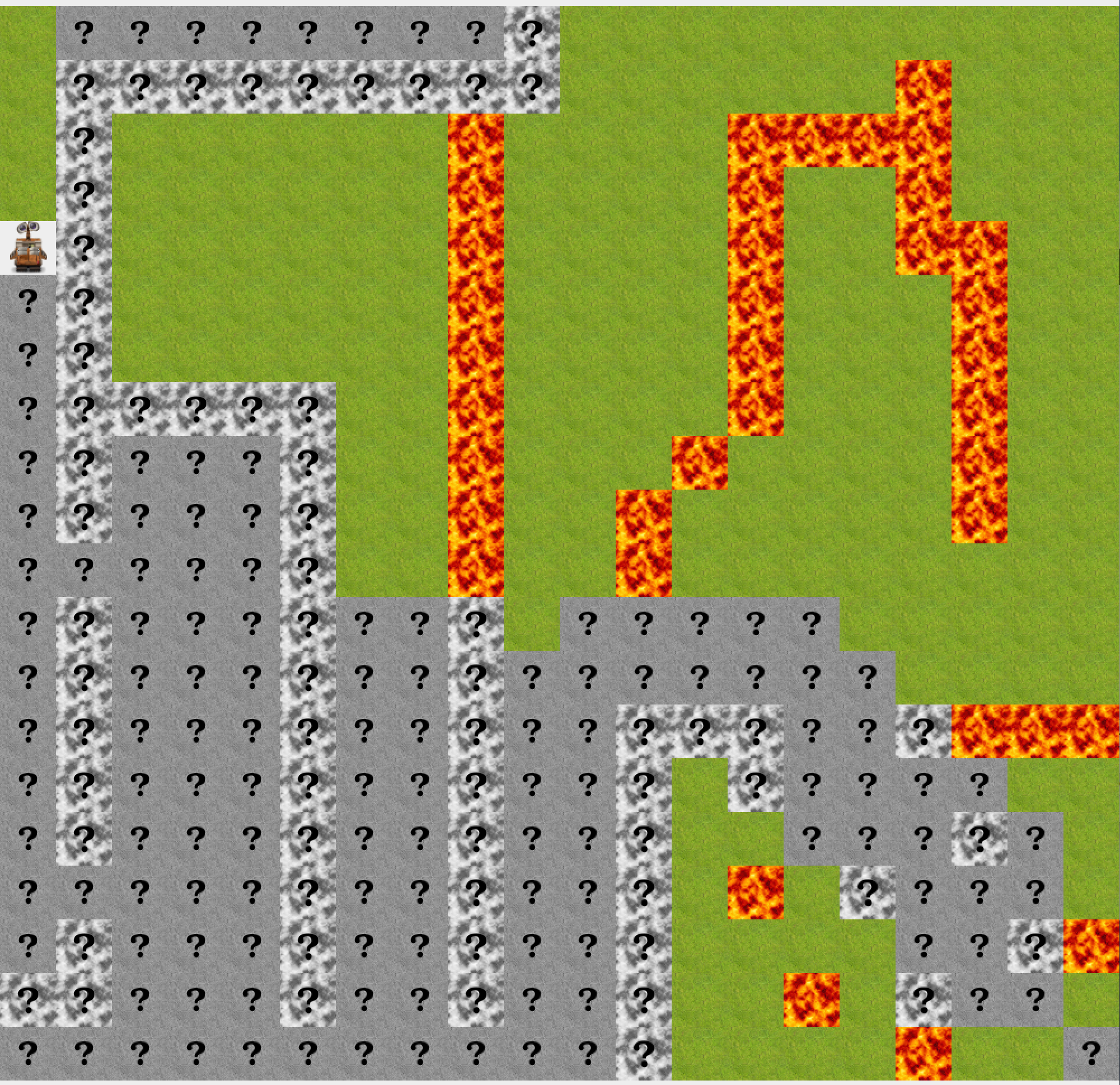
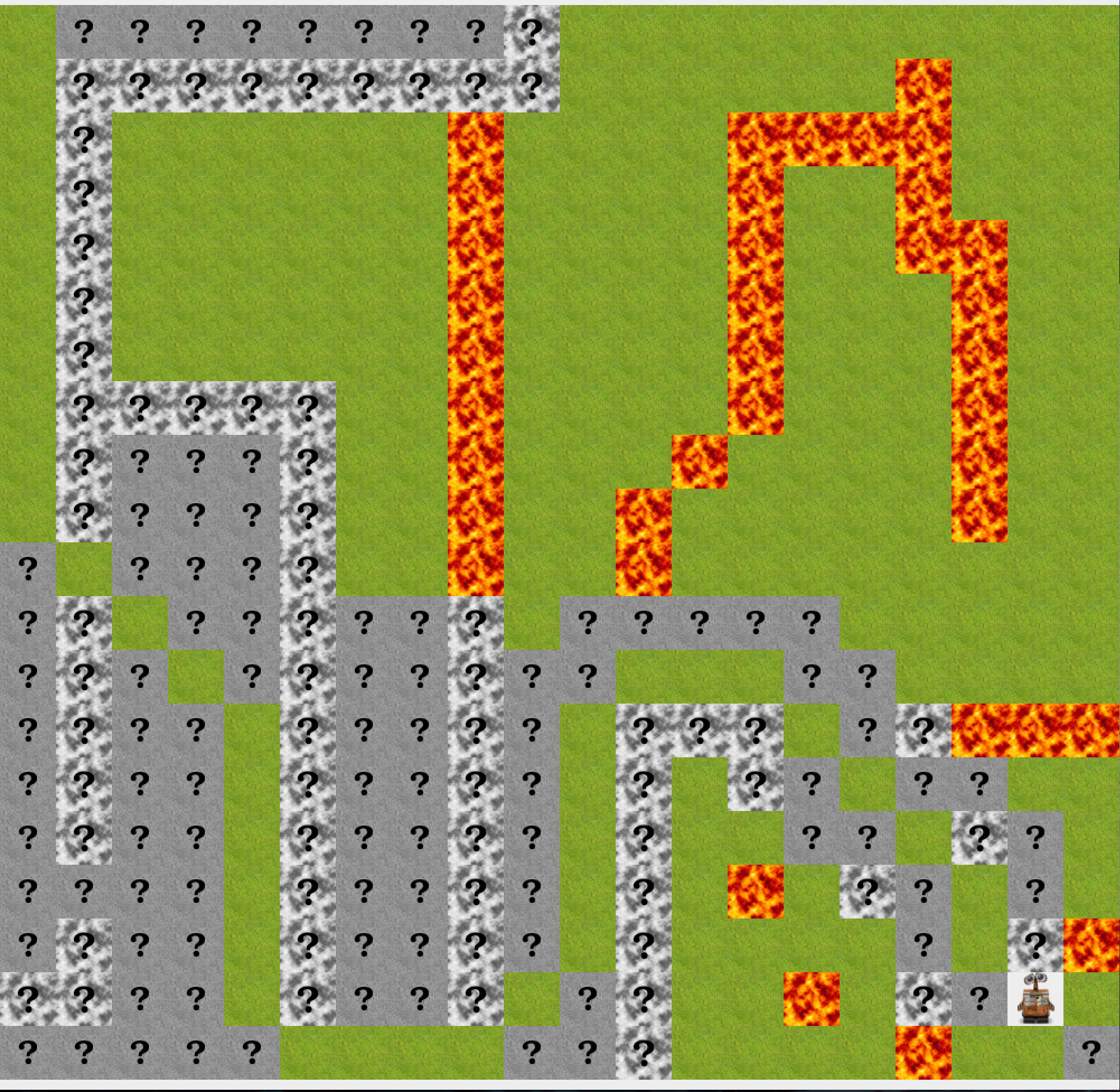
A* path finding system within a basic simulator. The simulator code was provided. The program takes in a *.txt file consisting map information.
Rules: Starting at the starting point, robot can go all 8 directions of one block distance.
Goal: Move the robot to the ending point in the shortest path possible.
Language: Java
In order to simulate uncertainty, the robot can be switched to "uncertain mode". Under uncertain mode, it is possible for the robot to receive incorrect information about its surroundings, the further it detects, the more incorrect it would be.
For instance, if the robot is looking at 1 block to its left, under "certain mode", it would return the correct result; under "uncertain mode", there is a small chance it may return the incorrect result. There is bigger chance it returns the incorrect result if it were look at 10 blocks away.
OPEN //the set of nodes to be evaluated
CLOSED //the set of nodes already evaluated
add the starting node to OPEN
loop
current = node in OPEN with the lowest heuristic value (h_cost + g_cost)
remove current from OPEN
add current to CLOSED
if current is the end node //path has been found
return
for each neighbour of the current node
if neighbour is not traversable(a wall) or neighbour is in CLOSED
skip to the next neighbour
if new path=h_cost+g_cost to neighbour is shorter OR neighbour is not in OPEN
set (h_cost + g_cost) of neighbour
set parent of neighbour to current
if neighbour is not in OPEN
add neighbour to OPEN


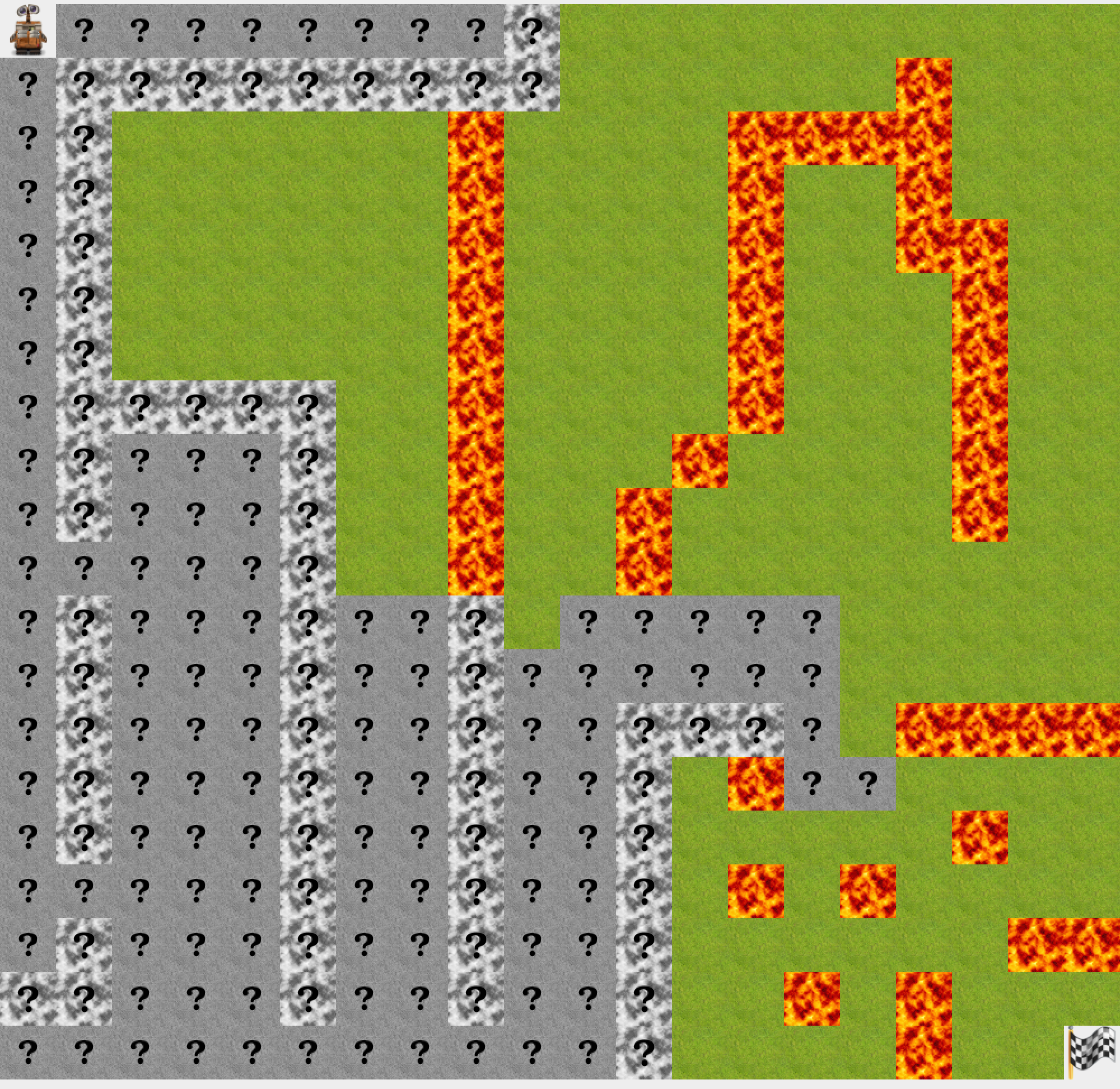
Under certain mode, the robot is guaranteed to find the optimal path and travel to the destination.
Time Complexity: Θ(n*m) where n and m are columns and rows
Space Complexity: Θ(n^2*m^2) where n and m are columns and rows There is a stack of size n*m for heuristic search, and a 2d Array of size n*m to store known blocks
The result is in the following tables:
| Test Case | # of Blocks in World | # of Moves | # of Pings | Ping coverage= pings/blocks |
|---|---|---|---|---|
| 1 | 8 | 3 | 11 | 137.500% |
| 2 | 32 | 7 | 37 | 115.625% |
| 3 | 120 | 13 | 179 | 149.167% |
| 4 | 400 | 38 | 334 | 83.500% |
| Spiral | 100 | 28 | 110 | 110.000% |
| Test Case | # of Blocks in World | # of Moves | # of Pings | Ping coverage= pings/blocks |
|---|---|---|---|---|
| 1 | 8 | 3 | 5 | 62.500% |
| 2 | 32 | 7 | 26 | 81.250% |
| 3 | 120 | 13 | 79 | 65.833% |
| 4 | 400 | 38 | 192 | 48.000% |
| Spiral | 100 | 28 | 97 | 97.000% |
After optimization, # of pings and ping coverage dropped significantly, by about 50% on average. In bigger maps, like the 4th test case, the ping coverage is less than 50%, which is quite efficient.
The Spiral is an interesting test case since there is only one viable path to the ending position, and every step along the way the first few blocks chosen from top of the queue will be walls, thus requiring a lot of pings. This resulted in a coverage ratio of 97%, which is very high.
Overall, the algorithm is proven to be able to find the optimal path with least amount of moves, while reducing the number of pings used to a minimum.
| Test Case | # of Blocks | Optimal # of Pings on Certain Maps | Average # of Pings on Uncertain Maps | Ping Multiplier= pings on uncertain maps / pings on certain maps |
|---|---|---|---|---|
| 1 | 8 | 5 | 2.135 | 0.427 |
| 2 | 32 | 26 | 24.840 | 0.955 |
| 3 | 120 | 79 | 353.045 | 4.469 |
| 4 | 400 | 192 | 1732.435 | 9.023 |
| Spiral | 100 | 97 | 543.295 | 5.601 |
| Test Case | # of Blocks | Optimal # of Moves on Certain Maps | Average # of Moves on Uncertain Maps | Move Multiplier= moves on uncertain maps / moves on certain maps |
|---|---|---|---|---|
| 1 | 8 | 3 | 3.000 | 1.000 |
| 2 | 32 | 7 | 8.940 | 1.277 |
| 3 | 120 | 13 | 45.650 | 3.512 |
| 4 | 400 | 38 | 83.150 | 2.190 |
| Spiral | 100 | 28 | 84.945 | 3.034 |
The resulting data is very interesting and somewhat unexpected. First, the Ping Multiplier is actually less than 1 for test case 1 and 2, suggesting that in smaller maps with less amount of obstacles our algorithm actually does better when the pings are probabilistic.
Secondly, the Ping Multiplier grows quite rapidly as the complexity and the size of the input maps grow. The “pocket wall” in test case 3, the large size of test case 4, and the spiral shaped wall all resulted in a very high Ping Multiplier, demonstrating how much the efficiency of the algorithm is impacted by having a unreliable pings.