InvertedSearch
Find-Object 0.4 required
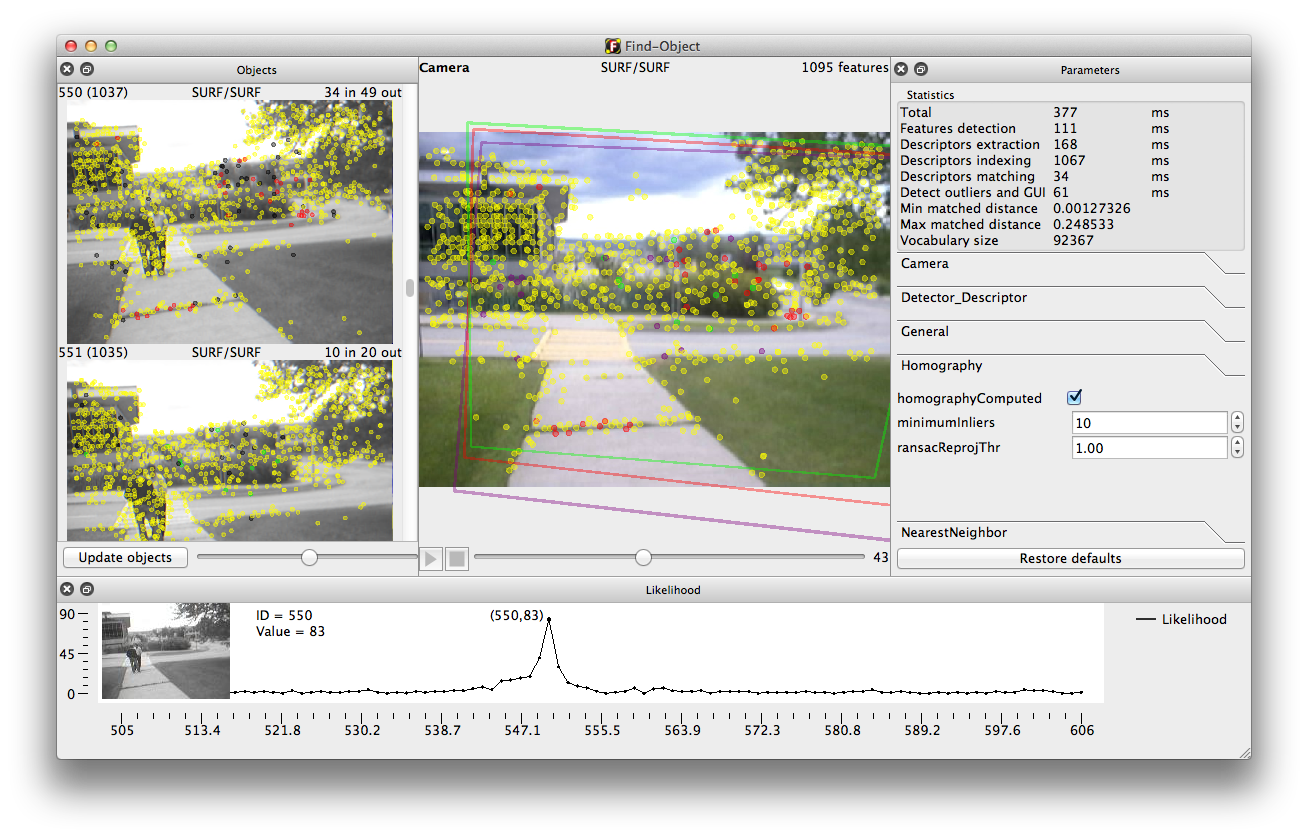
This tutorial will show how to compute the likelihood of a scene with all objects (e.g. where objects are places). In some way, it is the same step used in RTAB-Map to know how likely the current place looks like an old one (or pre-trained one).
In contrast to classic Find-Object usage (where we match descriptors from the objects to those in a vocabulary created with descriptors extracted from the scene), we create a vocabulary from all the objects' descriptors and we match scene's descriptors to this vocabulary. It is the inverted search mode.
EDIT: With version 0.4.4, you can activate General/IncrementalVocabulary parameter to have better results.
Video:
- Download the training dataset and the evaluation dataset (there are 100 images in each zip file corresponding to 2 traversals of the same area with a hand-held camera; the full dataset can be found here).
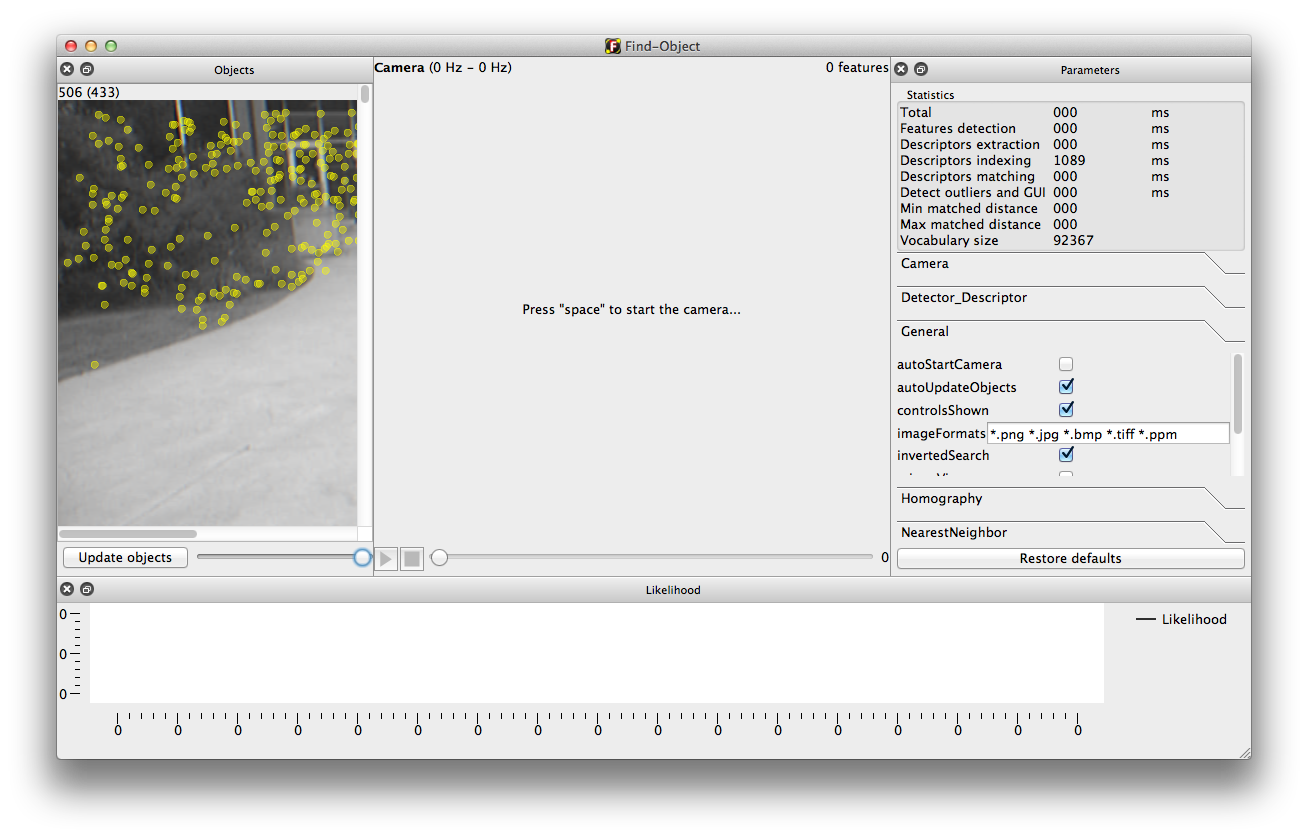
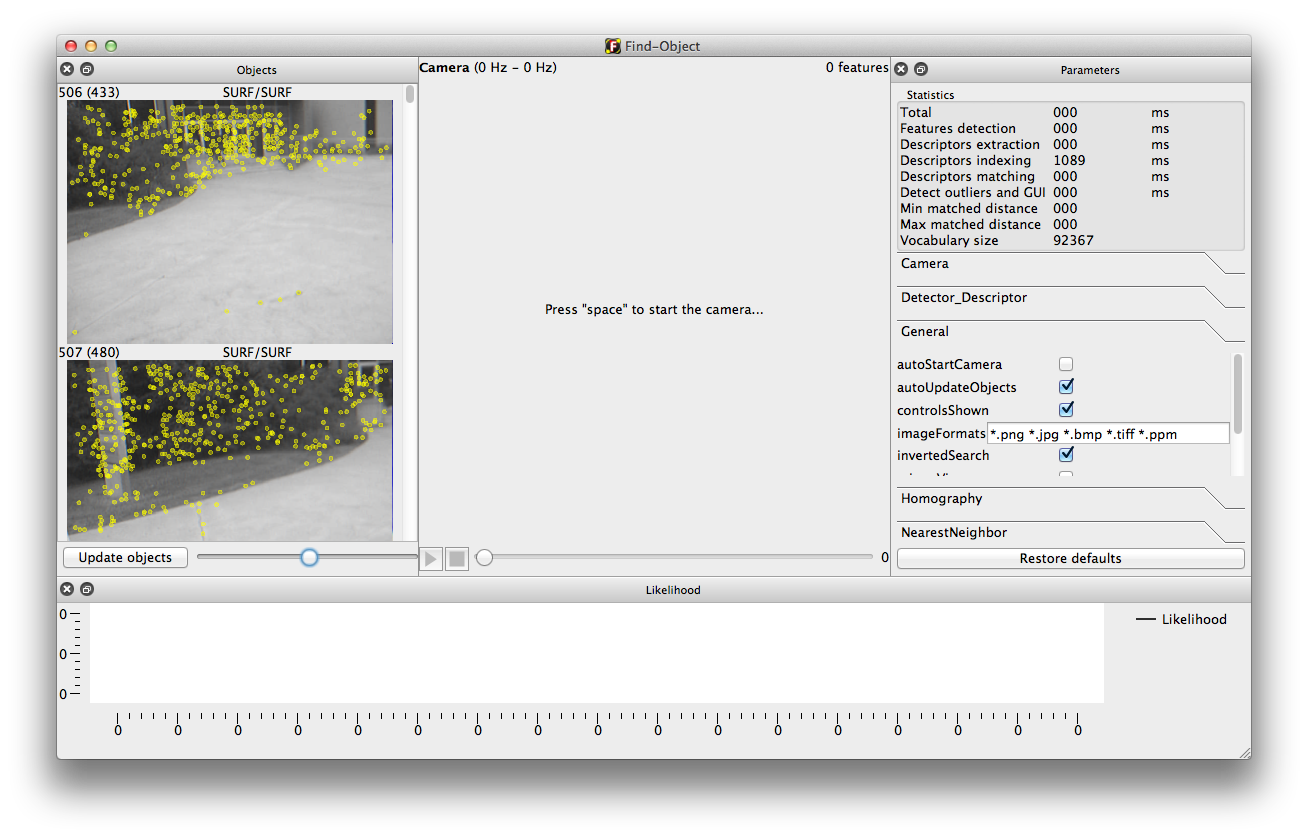
- Start Find-Object and reset all settings to default (menu "Edit->Restore all default settings").
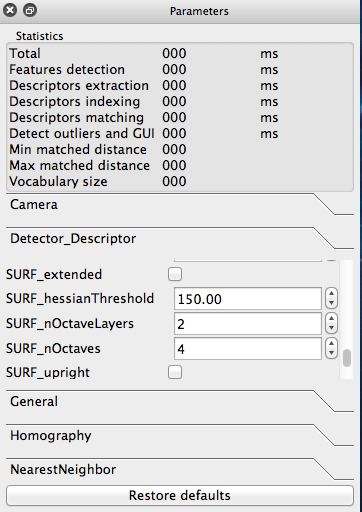
- Open Parameters panel (menu "View->Parameters") and go to "Detector_Descriptor" section. From there scroll down to SURF parameters. Uncheck "SURF_extended" parameter and set "SURF_hessianThreshold" to 150.
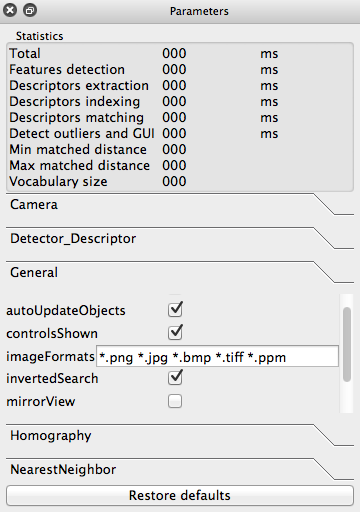
- In the
Generalsection of the parameters, checkcontrolsShownandinvertedSearch. UncheckmirrorView.
-
Version 0.4.4, activate
incrementalVocabulary, this will give better results.
- Open the likelihood panel (menu "View->Likelihood"). When detecting, this will show the likelihood score of the scene with all the objects.
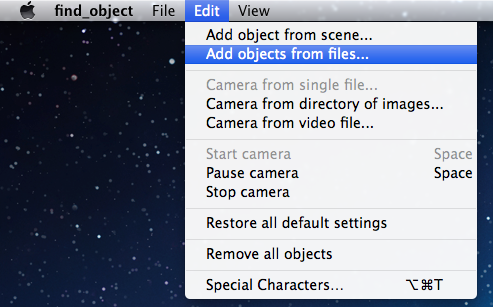
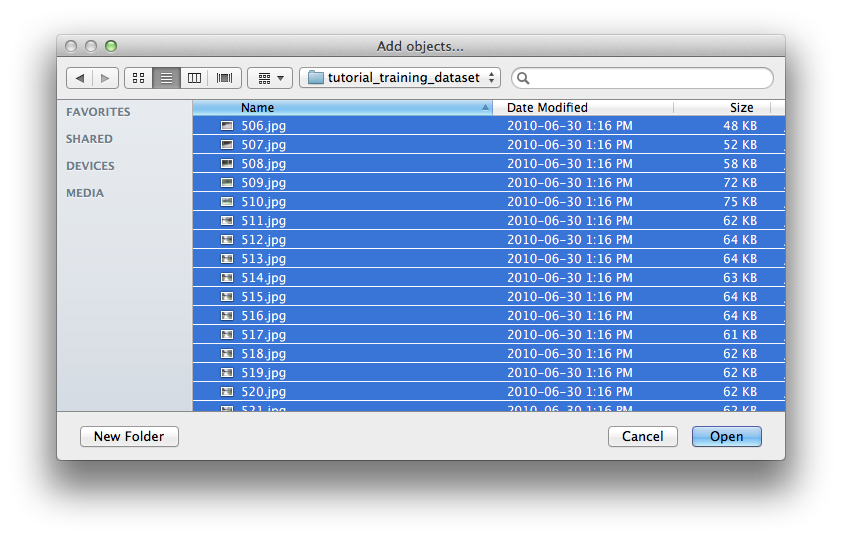
- Load objects from the training dataset previously downloaded by using the menu "Edit->Add objects from files...". Select all the files in the directory of the training dataset. This may take a while until all images are processed (extracting features and creating the vocabulary).
- You can resize the objects size by moving the scroll bar next to "Update objects".
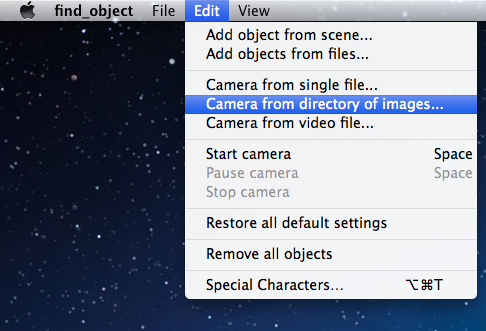
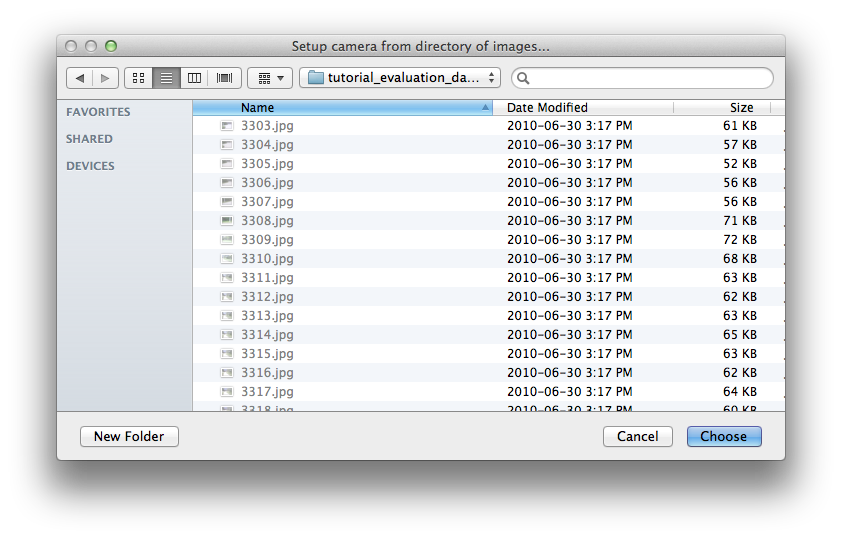
- Setup the camera to use a directory of images by using menu "Edit->Camera from directory of images...", then select the evaluation dataset.
- Press "Space" or action "Play" and observe what is going on. This would look like the demo video above. Note that the "Objects" panel scrolls automatically to object with the highest likelihood score. A rectangle is shown if the homography can be computed.
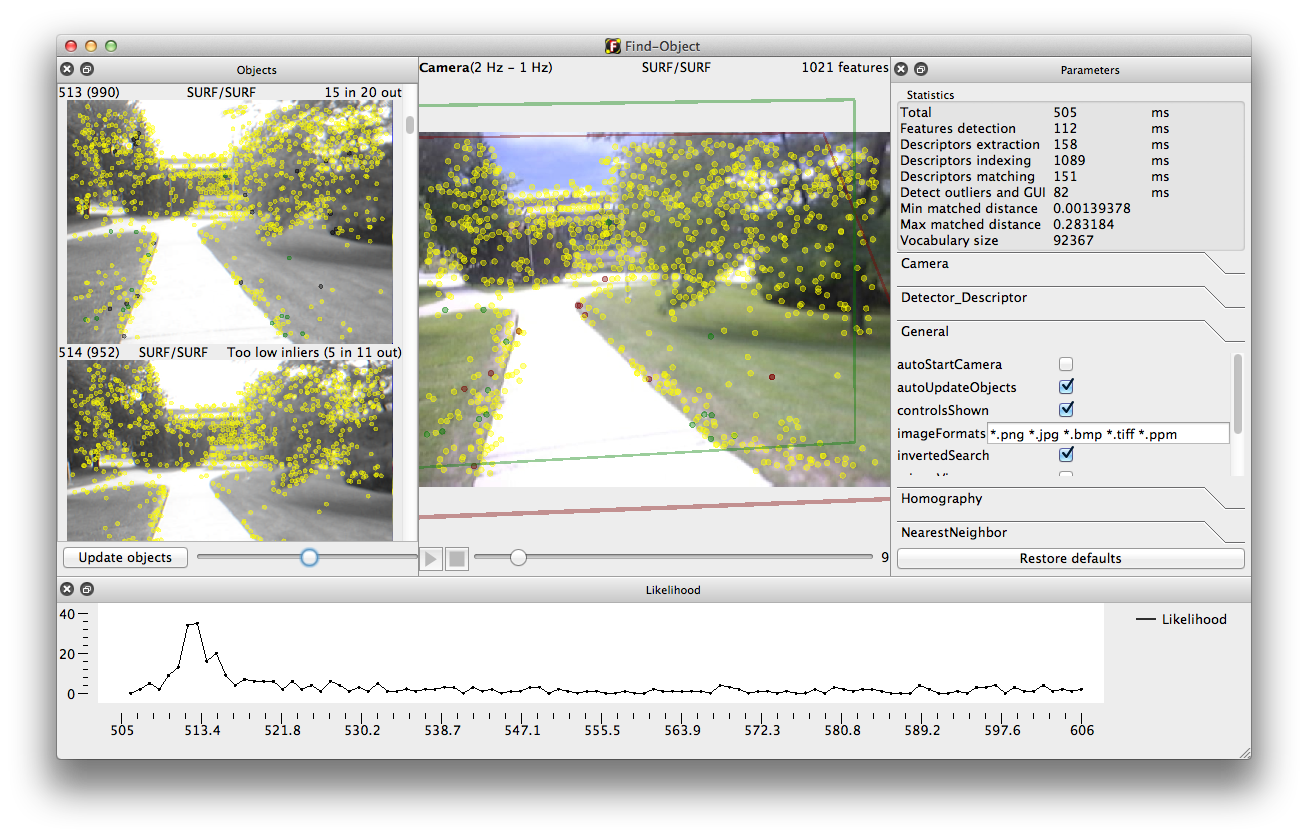
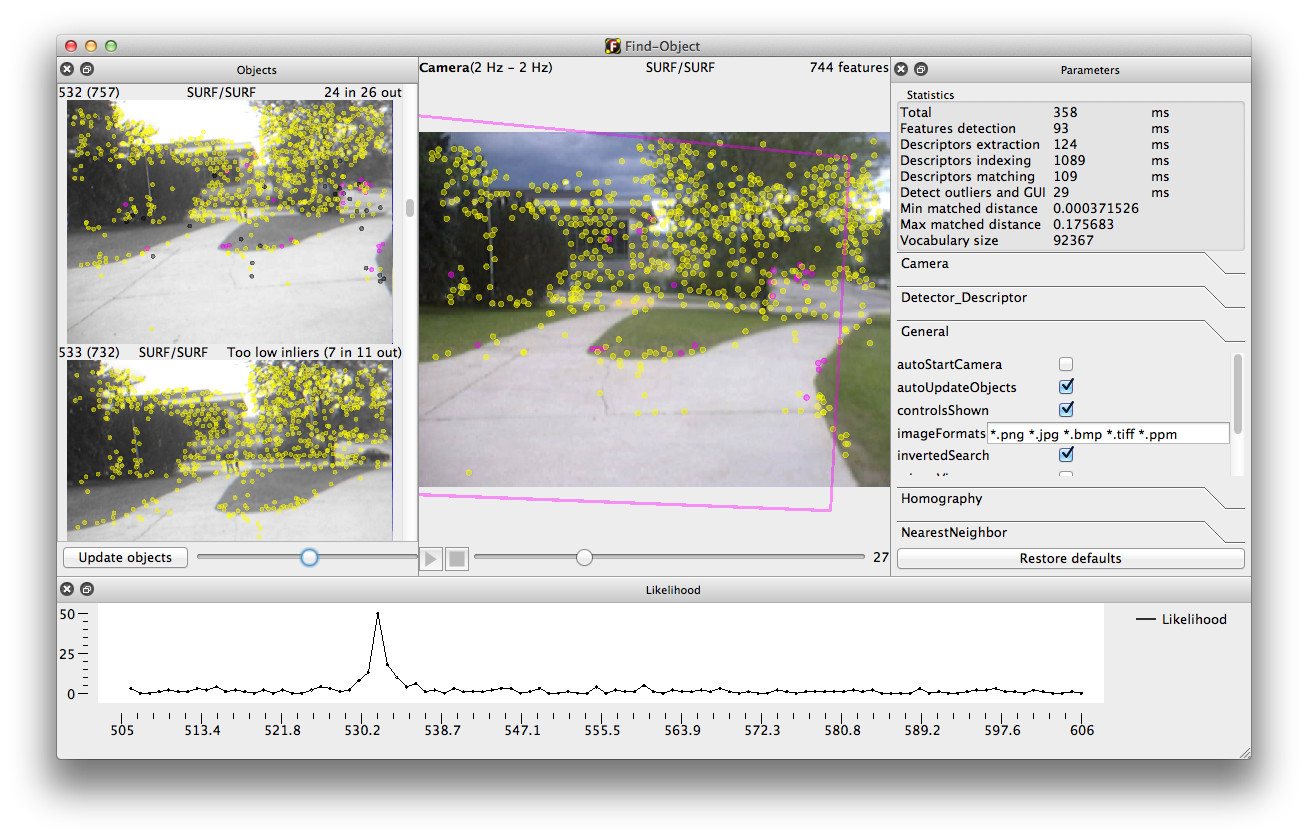
- On the likelihood plot, you can mouse over the dots to show the related image.