-
Notifications
You must be signed in to change notification settings - Fork 39
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Showing
8 changed files
with
580 additions
and
187 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
88 changes: 88 additions & 0 deletions
88
docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09081.md
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,88 @@ | ||
| # 360° 9g舵机 | ||
|
|
||
|  | ||
|
|
||
| ## 规格参数 | ||
|
|
||
| | 项目 | 规格 | | ||
| | :-: | :-: | | ||
| | SKU | EF09081 | | ||
| | 使用环境条件 | | | ||
| | 工作电压 | 3.3~5V | | ||
| | 工作温度 | -25°C~70°C | | ||
| | 机械特性 | | | ||
| | 机械极限角度 | 360° | | ||
| | 重量 | 10g±5% | | ||
|
|
||
|
|
||
| | 项目 | 3.3V 测试 | 5.0V 测试 | | ||
| |-------------------|--------------------|--------------------| | ||
| | 静态电流 | 5mA | 5mA | | ||
| | 空载转速 | 76RPM | 120RPM | | ||
| | 空载电流 | 90mA | 90mA | | ||
| | 堵转扭矩 | 1.3kg.cm | 1.6kg.cm | | ||
| | 堵转电流 | 400mA±10% | 750mA±10% | | ||
|
|
||
| ## 硬件连接 | ||
|
|
||
| 此处以悟空扩展板为例。 | ||
|
|
||
| 将舵机连接到扩展板的S1接口。 | ||
|
|
||
|  | ||
|
|
||
|
|
||
| ## 添加专属扩展库 | ||
|
|
||
| 在MakeCode的代码抽屉中点击“高级”,查看更多代码选项。 | ||
|
|
||
|  | ||
|
|
||
| 为了给哪吒扩展板编程,我们需要添加一个扩展库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框,搜索“哪吒”,然后点击下载这个代码库。 | ||
|
|
||
|  | ||
|
|
||
| *注意:*如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。 | ||
|
|
||
|
|
||
| ### 如图所示编写程序 | ||
|
|
||
|  | ||
|
|
||
|
|
||
| ### 参考程序 | ||
|
|
||
| 请参考程序连接:[https://makecode.microbit.org/_ewhiK2hvfRX4](https://makecode.microbit.org/_ewhiK2hvfRX4) | ||
|
|
||
| 你也可以通过以下网页直接下载程序。 | ||
|
|
||
| <div | ||
| style={{ | ||
| position: 'relative', | ||
| paddingBottom: '60%', | ||
| overflow: 'hidden', | ||
| }} | ||
| > | ||
| <iframe | ||
| src="https://makecode.microbit.org/_ewhiK2hvfRX4" | ||
| frameborder="0" | ||
| sandbox="allow-popups allow-forms allow-scripts allow-same-origin" | ||
| style={{ | ||
| position: 'absolute', | ||
| width: '100%', | ||
| height: '100%', | ||
| }} | ||
| /> | ||
| </div> | ||
|
|
||
| ### 结果 | ||
|
|
||
| 按键A按下时舵机全速转动,当按键B按下时舵机停止转动。 | ||
|
|
||
| ### 舵机注意事项 | ||
|
|
||
| <b>当使用舵机时,应先调整舵机角度,并根据案例需求调整舵机角度进行验证,验证完成后再安装相应的结构件,防止出现堵转的情况而导致舵机烧毁。</b> | ||
| <br /> | ||
| <b>注意:当使用舵机时,应该注意舵机是否有堵转,如果舵机堵转,可能有烧毁的风险。</b> | ||
| <br /> | ||
| <b>注意:当使用舵机时,应注意舵机转动的动作后续是否需要添加延时,舵机转动需要时间执行,如果在舵机执行指令的过程中,出现新的舵机指令,会覆盖前一条舵机转动的指令,导致舵机转动不到位的情况。</b> |
89 changes: 89 additions & 0 deletions
89
docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09082.md
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,89 @@ | ||
| # 180° 9g舵机 | ||
|
|
||
|  | ||
|
|
||
| ## 规格参数 | ||
|
|
||
| | 项目 | 规格 | | ||
| | :-: | :-: | | ||
| | SKU | EF09082 | | ||
| | 使用环境条件 | | | ||
| | 工作电压 | 4.8~6V | | ||
| | 工作温度 | -25°C~70°C | | ||
| | 机械特性 | | | ||
| | 机械极限角度 | 200°±5° | | ||
| | 重量 | 10g±5% | | ||
| | 控制特性 | | | ||
| | 操作角度 | 180°±3°(500~2500μsec) | | ||
| | 选装方向 | 顺时针 | | ||
| | 死区宽度 | 5 μsec | | ||
|
|
||
| | 工作电压 | 4.8V | 6.0V | | ||
| |-------------------|----------------|----------------| | ||
| | 静态电流 | 5mA | 5mA | | ||
| | 空载转速 | 0.11sec/60° | 0.09sec/60° | | ||
| | 空载电流 | 90mA | 200mA | | ||
| | 堵转扭矩 | 1.3kg.cm | 1.8kg.cm | | ||
| | 堵转电流 | 500-750mA±10% | 500-750mA±10% | | ||
|
|
||
| ## 硬件连接 | ||
|
|
||
| 此处以悟空扩展板为例。 | ||
|
|
||
| 将舵机连接到扩展板的S1接口。 | ||
|
|
||
|  | ||
|
|
||
|
|
||
| ## 添加专属扩展库 | ||
|
|
||
| 在MakeCode的代码抽屉中点击“高级”,查看更多代码选项。 | ||
|
|
||
|  | ||
|
|
||
| 为了给哪吒扩展板编程,我们需要添加一个扩展库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框,搜索“哪吒”,然后点击下载这个代码库。 | ||
|
|
||
|  | ||
|
|
||
| *注意:*如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。 | ||
|
|
||
| ### 如图所示编写程序 | ||
|
|
||
|  | ||
|
|
||
|
|
||
| 请参考程序连接:[https://makecode.microbit.org/_iE0FRyLoA7ak](https://makecode.microbit.org/_iE0FRyLoA7ak) | ||
|
|
||
| 你也可以通过以下网页直接下载程序。 | ||
|
|
||
| <div | ||
| style={{ | ||
| position: 'relative', | ||
| paddingBottom: '60%', | ||
| overflow: 'hidden', | ||
| }} | ||
| > | ||
| <iframe | ||
| src="https://makecode.microbit.org/_iE0FRyLoA7ak" | ||
| frameborder="0" | ||
| sandbox="allow-popups allow-forms allow-scripts allow-same-origin" | ||
| style={{ | ||
| position: 'absolute', | ||
| width: '100%', | ||
| height: '100%', | ||
| }} | ||
| /> | ||
| </div> | ||
| </div> | ||
|
|
||
| ### 结果 | ||
|
|
||
| 按键A按下时舵机转动到0°,当按键B按下时舵机转动到180°。 | ||
|
|
||
| ### 舵机注意事项 | ||
|
|
||
| <b>当使用舵机时,应先调整舵机角度,并根据案例需求调整舵机角度进行验证,验证完成后再安装相应的结构件,防止出现堵转的情况而导致舵机烧毁。</b> | ||
| <br /> | ||
| <b>注意:当使用舵机时,应该注意舵机是否有堵转,如果舵机堵转,可能有烧毁的风险。</b> | ||
| <br /> | ||
| <b>注意:当使用舵机时,应注意舵机转动的动作后续是否需要添加延时,舵机转动需要时间执行,如果在舵机执行指令的过程中,出现新的舵机指令,会覆盖前一条舵机转动的指令,导致舵机转动不到位的情况。</b> |
100 changes: 100 additions & 0 deletions
100
docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09086.md
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,100 @@ | ||
| # 360° 9g积木舵机 | ||
|
|
||
| ## 规格参数 | ||
|
|
||
|  | ||
|
|
||
| | 项目 | 规格 | | ||
| | :-: | :-: | | ||
| | SKU | EF09086 | | ||
| | 使用环境条件 | | | ||
| | 工作电压 | 4.8~6V | | ||
| | 工作温度 | -10℃~50℃ | | ||
| | 机械特性 | | | ||
| | 机械极限角度 | 360° | | ||
| | 重量 | 9 ± 1g | | ||
| | 减速比 | 1/266 | | ||
| | 齿轮虚位 | ≤1° | | ||
| | 控制特性 | | | ||
| | 操作角度 | 360° | | ||
| | 选装方向 | 顺时针 | | ||
| | 可动作角度范围 | ≈360° | | ||
|
|
||
|
|
||
| | 项目 | 4.8V 测试 | 6.0V 测试 | | ||
| |-------------------|--------------------|--------------------| | ||
| | 空载速度 | 70±5r/min | 90±5r/min | | ||
| | 空载电流 | 70±20mA | 90±20mA | | ||
| | 停止扭力 | 0.5±0.2 kg-cm | 0.7±0.2kg-cm | | ||
| | 停止电流 | 0.8±0.1A | 0.9±0.1A | | ||
| | 待机电流 | 7±1mA | 7±1 mA | | ||
| | 空载寿命 | >50000 次 | >40000 次 | | ||
| | 温飘(环境温度 25°C) | ≤1° | ≤1° | | ||
|
|
||
|
|
||
| ## 硬件连接 | ||
|
|
||
| 此处以wukong扩展板为例。 | ||
|
|
||
| 将舵机连接到扩展板的S1接口。 | ||
|
|
||
| 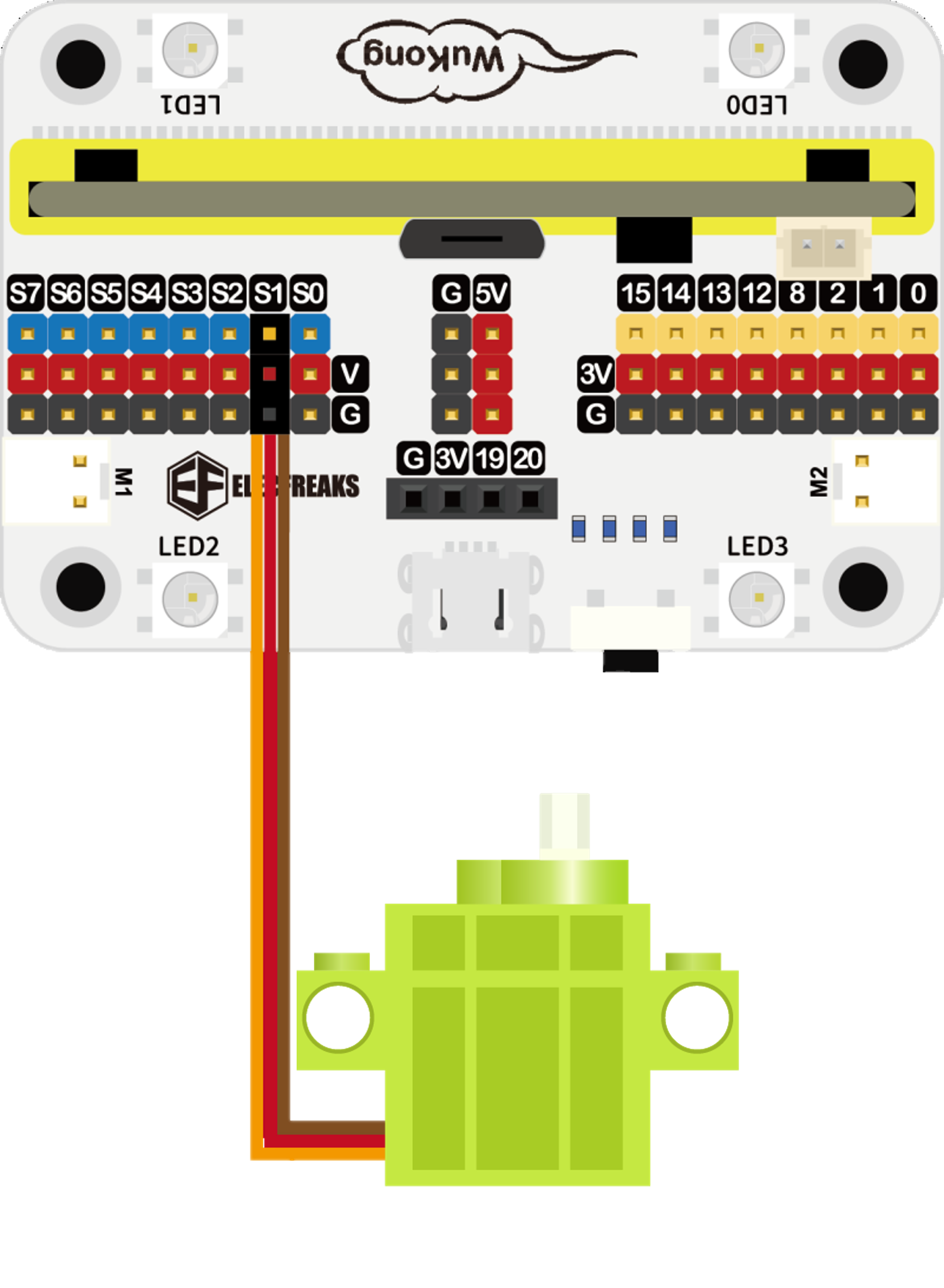 | ||
|
|
||
| ## 添加专属扩展库 | ||
|
|
||
| 在MakeCode的代码抽屉中点击“高级”,查看更多代码选项。 | ||
|
|
||
|  | ||
|
|
||
| 为了给哪吒扩展板编程,我们需要添加一个扩展库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框,搜索“哪吒”,然后点击下载这个代码库。 | ||
|
|
||
|  | ||
|
|
||
| *注意:*如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。 | ||
|
|
||
|
|
||
| ### 如图所示编写程序 | ||
|
|
||
|  | ||
|
|
||
|
|
||
| ### 参考程序 | ||
|
|
||
| 请参考程序连接:[https://makecode.microbit.org/_ewhiK2hvfRX4](https://makecode.microbit.org/_ewhiK2hvfRX4) | ||
|
|
||
| 你也可以通过以下网页直接下载程序。 | ||
|
|
||
| <div | ||
| style={{ | ||
| position: 'relative', | ||
| paddingBottom: '60%', | ||
| overflow: 'hidden', | ||
| }} | ||
| > | ||
| <iframe | ||
| src="https://makecode.microbit.org/_ewhiK2hvfRX4" | ||
| frameborder="0" | ||
| sandbox="allow-popups allow-forms allow-scripts allow-same-origin" | ||
| style={{ | ||
| position: 'absolute', | ||
| width: '100%', | ||
| height: '100%', | ||
| }} | ||
| /> | ||
| </div> | ||
|
|
||
| ### 结果 | ||
|
|
||
| 按键A按下时舵机全速转动,当按键B按下时舵机停止转动。 | ||
|
|
||
| ### 注意事项 | ||
|
|
||
| <b>注意:当使用电机时,应该注意电机是否有堵转,如果电机堵转,可能有烧毁的风险。</b> | ||
|
|
||
| ### 舵机注意事项 | ||
|
|
||
| <b>当使用舵机时,应先调整舵机角度,并根据案例需求调整舵机角度进行验证,验证完成后再安装相应的结构件,防止出现堵转的情况而导致舵机烧毁。</b> | ||
| <br /> | ||
| <b>注意:当使用舵机时,应该注意舵机是否有堵转,如果舵机堵转,可能有烧毁的风险。</b> | ||
| <br /> | ||
| <b>注意:当使用舵机时,应注意舵机转动的动作后续是否需要添加延时,舵机转动需要时间执行,如果在舵机执行指令的过程中,出现新的舵机指令,会覆盖前一条舵机转动的指令,导致舵机转动不到位的情况。</b> |
90 changes: 90 additions & 0 deletions
90
docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09087.md
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,90 @@ | ||
| # 积木电机 | ||
|
|
||
| ## 规格参数 | ||
|
|
||
|  | ||
|
|
||
| | 项目 | 规格 | | ||
| | :-: | :-: | | ||
| | SKU | EF09087 | | ||
| | 使用环境条件 | | | ||
| | 工作电压 | 3V | | ||
| | 工作温度 | -10℃~50℃ | | ||
| | 机械特性 | | | ||
| | 机械极限角度 | 360° | | ||
| | 重量 | 9 ± 1g | | ||
| | 减速比 | 1/266 | | ||
| | 齿轮虚位 | ≤1° | | ||
| | 控制特性 | | | ||
| | 操作角度 | 360° | | ||
| | 选装方向 | 顺时针 | | ||
| | 可动作角度范围 | 360° | | ||
|
|
||
|
|
||
| | 项目(Item) | 3V 测试 | | ||
| |------------------|------------------| | ||
| | 空載速度 | 70±5r/min | | ||
| | 空載电流 | 70±20mA | | ||
| | 停止扭力 | 0.5±0.1 kg-cm | | ||
| | 停止电流 | 0.8±0.1A | | ||
| | 待机电流 | 7±1mA | | ||
| | 空載寿命 | 大于 200 小时 | | ||
|
|
||
|
|
||
| ## 硬件连接 | ||
|
|
||
| 此处以wukong扩展板为例。 | ||
|
|
||
| 将电机连接到扩展板的M1接口。 | ||
|
|
||
|  | ||
|
|
||
| ## 添加专属扩展库 | ||
|
|
||
| 在MakeCode的代码抽屉中点击“高级”,查看更多代码选项。 | ||
|
|
||
|  | ||
|
|
||
| 为了给哪吒扩展板编程,我们需要添加一个扩展库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框,搜索“哪吒”,然后点击下载这个代码库。 | ||
|
|
||
|  | ||
|
|
||
| *注意:*如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。 | ||
|
|
||
| ### 如图所示编写程序 | ||
|
|
||
|  | ||
|
|
||
|
|
||
| ### 参考程序 | ||
|
|
||
| 请参考程序连接:[https://makecode.microbit.org/_U3p38hgW2d33](https://makecode.microbit.org/_U3p38hgW2d33) | ||
|
|
||
| 你也可以通过以下网页直接下载程序,下载完成后即可开始运行程序。 | ||
|
|
||
| <div | ||
| style={{ | ||
| position: 'relative', | ||
| paddingBottom: '60%', | ||
| overflow: 'hidden', | ||
| }} | ||
| > | ||
| <iframe | ||
| src="https://makecode.microbit.org/_U3p38hgW2d33" | ||
| frameborder="0" | ||
| sandbox="allow-popups allow-forms allow-scripts allow-same-origin" | ||
| style={{ | ||
| position: 'absolute', | ||
| width: '100%', | ||
| height: '100%', | ||
| }} | ||
| /> | ||
| </div> | ||
|
|
||
| ### 结果 | ||
|
|
||
| 按键A按下时电机转动,当按键B按下时电机停止转动。 | ||
|
|
||
| ### 注意事项 | ||
|
|
||
| <b>注意:当使用电机时,应该注意电机是否有堵转,如果电机堵转,可能有烧毁的风险。</b> |
Oops, something went wrong.