From 73408d9366f20f39fd1a4424ce3585f3d78d0431 Mon Sep 17 00:00:00 2001
From: lah-1201 <978594708@qq.com>
Date: Sat, 1 Jun 2024 17:09:06 +0800
Subject: [PATCH] Ares: wiki
---
docs/microbit/expansion-board/nezha.md | 2 +-
.../octopus-sensors/sensor/octopus_ef09081.md | 88 +++++++++
.../octopus-sensors/sensor/octopus_ef09082.md | 89 +++++++++
.../octopus-sensors/sensor/octopus_ef09086.md | 100 ++++++++++
.../octopus-sensors/sensor/octopus_ef09087.md | 90 +++++++++
.../planet-x-sensors/Plant_X_EF10154.md | 102 ++++++++++
.../planet-x-sensors/Plant_X_EF10155.md | 110 +++++++++++
.../servo-and-motor-product-specification.md | 186 ------------------
8 files changed, 580 insertions(+), 187 deletions(-)
create mode 100644 docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09081.md
create mode 100644 docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09082.md
create mode 100644 docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09086.md
create mode 100644 docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09087.md
create mode 100644 docs/microbit/sensor/planet-x-sensors/Plant_X_EF10154.md
create mode 100644 docs/microbit/sensor/planet-x-sensors/Plant_X_EF10155.md
delete mode 100644 docs/microbit/sensor/servo-and-motor/servo-and-motor-product-specification.md
diff --git a/docs/microbit/expansion-board/nezha.md b/docs/microbit/expansion-board/nezha.md
index 7d4b4d70b..74d8ed0fe 100644
--- a/docs/microbit/expansion-board/nezha.md
+++ b/docs/microbit/expansion-board/nezha.md
@@ -29,7 +29,7 @@ RJ11端口设计,防止误插,易于使用。
| 最大工作电压 | 4.2V |
| 额定工作电压 | 3.7V |
| 最小工作电压 | 3.2V |
-| 电机接口输出电压 | 5.6V |
+| 电机接口输出电压 | 5.5V |
| 电机接口最大输出电流 | 2.8A |
| 舵机接口输出电压 | 5.6V |
| 舵机接口最大输出电流 | 3.0A |
diff --git a/docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09081.md b/docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09081.md
new file mode 100644
index 000000000..ba7093ebc
--- /dev/null
+++ b/docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09081.md
@@ -0,0 +1,88 @@
+# 360° 9g舵机
+
+
+
+## 规格参数
+
+| 项目 | 规格 |
+| :-: | :-: |
+| SKU | EF09081 |
+| 使用环境条件 | |
+| 工作电压 | 3.3~5V |
+| 工作温度 | -25°C~70°C |
+| 机械特性 | |
+| 机械极限角度 | 360° |
+| 重量 | 10g±5% |
+
+
+| 项目 | 3.3V 测试 | 5.0V 测试 |
+|-------------------|--------------------|--------------------|
+| 静态电流 | 5mA | 5mA |
+| 空载转速 | 76RPM | 120RPM |
+| 空载电流 | 90mA | 90mA |
+| 堵转扭矩 | 1.3kg.cm | 1.6kg.cm |
+| 堵转电流 | 400mA±10% | 750mA±10% |
+
+## 硬件连接
+
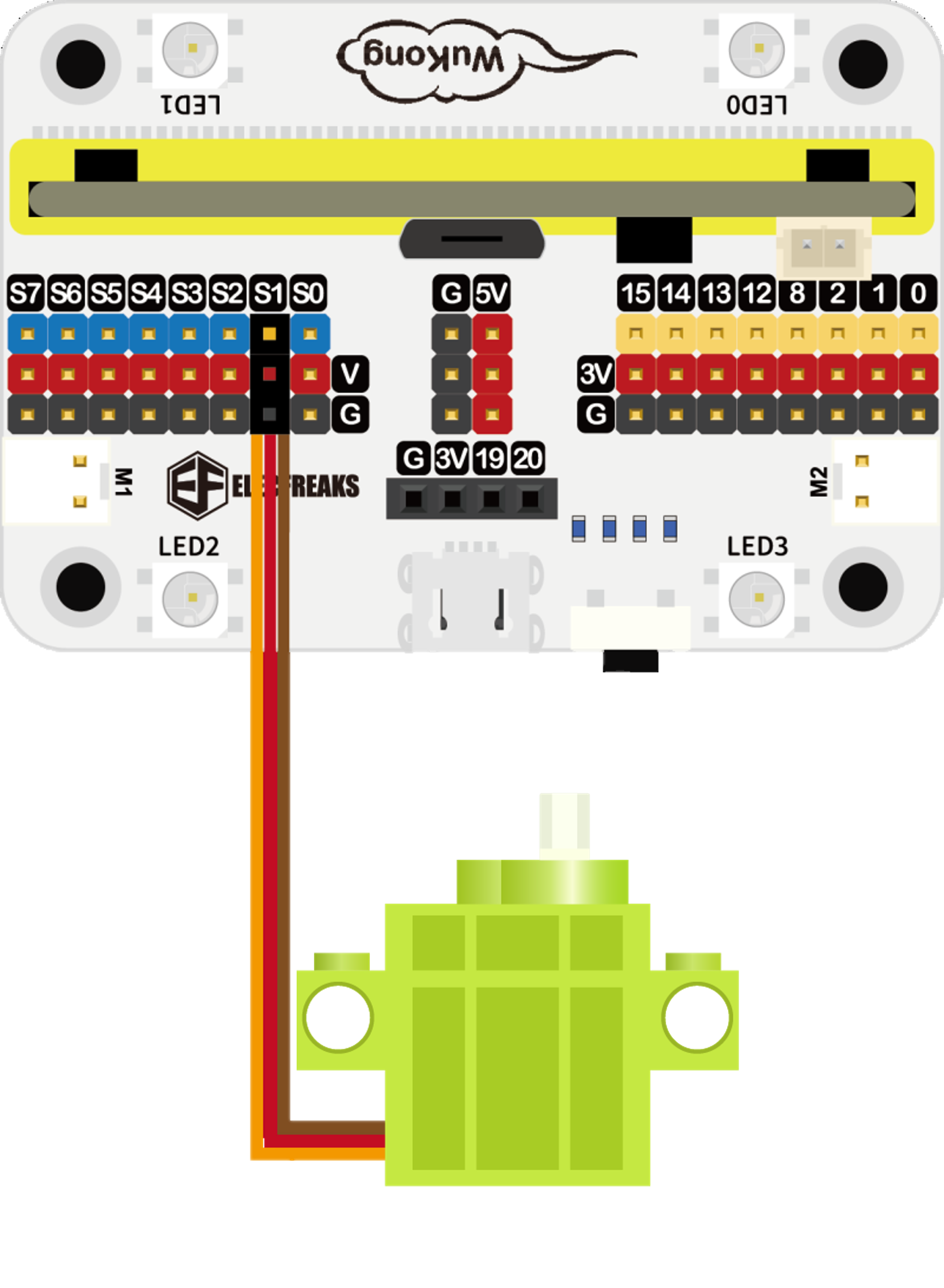
+此处以悟空扩展板为例。
+
+将舵机连接到扩展板的S1接口。
+
+
+
+
+## 添加专属扩展库
+
+在MakeCode的代码抽屉中点击“高级”,查看更多代码选项。
+
+
+
+为了给哪吒扩展板编程,我们需要添加一个扩展库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框,搜索“哪吒”,然后点击下载这个代码库。
+
+
+
+*注意:*如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
+
+
+### 如图所示编写程序
+
+
+
+
+### 参考程序
+
+请参考程序连接:[https://makecode.microbit.org/_ewhiK2hvfRX4](https://makecode.microbit.org/_ewhiK2hvfRX4)
+
+你也可以通过以下网页直接下载程序。
+
+
+
+
+
+### 结果
+
+按键A按下时舵机全速转动,当按键B按下时舵机停止转动。
+
+### 舵机注意事项
+
+当使用舵机时,应先调整舵机角度,并根据案例需求调整舵机角度进行验证,验证完成后再安装相应的结构件,防止出现堵转的情况而导致舵机烧毁。
+
+注意:当使用舵机时,应该注意舵机是否有堵转,如果舵机堵转,可能有烧毁的风险。
+
+注意:当使用舵机时,应注意舵机转动的动作后续是否需要添加延时,舵机转动需要时间执行,如果在舵机执行指令的过程中,出现新的舵机指令,会覆盖前一条舵机转动的指令,导致舵机转动不到位的情况。
diff --git a/docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09082.md b/docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09082.md
new file mode 100644
index 000000000..026cb8415
--- /dev/null
+++ b/docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09082.md
@@ -0,0 +1,89 @@
+# 180° 9g舵机
+
+
+
+## 规格参数
+
+| 项目 | 规格 |
+| :-: | :-: |
+| SKU | EF09082 |
+| 使用环境条件 | |
+| 工作电压 | 4.8~6V |
+| 工作温度 | -25°C~70°C |
+| 机械特性 | |
+| 机械极限角度 | 200°±5° |
+| 重量 | 10g±5% |
+| 控制特性 | |
+| 操作角度 | 180°±3°(500~2500μsec) |
+| 选装方向 | 顺时针 |
+| 死区宽度 | 5 μsec |
+
+| 工作电压 | 4.8V | 6.0V |
+|-------------------|----------------|----------------|
+| 静态电流 | 5mA | 5mA |
+| 空载转速 | 0.11sec/60° | 0.09sec/60° |
+| 空载电流 | 90mA | 200mA |
+| 堵转扭矩 | 1.3kg.cm | 1.8kg.cm |
+| 堵转电流 | 500-750mA±10% | 500-750mA±10% |
+
+## 硬件连接
+
+此处以悟空扩展板为例。
+
+将舵机连接到扩展板的S1接口。
+
+
+
+
+## 添加专属扩展库
+
+在MakeCode的代码抽屉中点击“高级”,查看更多代码选项。
+
+
+
+为了给哪吒扩展板编程,我们需要添加一个扩展库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框,搜索“哪吒”,然后点击下载这个代码库。
+
+
+
+*注意:*如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
+
+### 如图所示编写程序
+
+
+
+
+请参考程序连接:[https://makecode.microbit.org/_iE0FRyLoA7ak](https://makecode.microbit.org/_iE0FRyLoA7ak)
+
+你也可以通过以下网页直接下载程序。
+
+
+
+
+
+
+### 结果
+
+按键A按下时舵机转动到0°,当按键B按下时舵机转动到180°。
+
+### 舵机注意事项
+
+当使用舵机时,应先调整舵机角度,并根据案例需求调整舵机角度进行验证,验证完成后再安装相应的结构件,防止出现堵转的情况而导致舵机烧毁。
+
+注意:当使用舵机时,应该注意舵机是否有堵转,如果舵机堵转,可能有烧毁的风险。
+
+注意:当使用舵机时,应注意舵机转动的动作后续是否需要添加延时,舵机转动需要时间执行,如果在舵机执行指令的过程中,出现新的舵机指令,会覆盖前一条舵机转动的指令,导致舵机转动不到位的情况。
diff --git a/docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09086.md b/docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09086.md
new file mode 100644
index 000000000..24a7e89f4
--- /dev/null
+++ b/docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09086.md
@@ -0,0 +1,100 @@
+# 360° 9g积木舵机
+
+## 规格参数
+
+
+
+| 项目 | 规格 |
+| :-: | :-: |
+| SKU | EF09086 |
+| 使用环境条件 | |
+| 工作电压 | 4.8~6V |
+| 工作温度 | -10℃~50℃ |
+| 机械特性 | |
+| 机械极限角度 | 360° |
+| 重量 | 9 ± 1g |
+| 减速比 | 1/266 |
+| 齿轮虚位 | ≤1° |
+| 控制特性 | |
+| 操作角度 | 360° |
+| 选装方向 | 顺时针 |
+| 可动作角度范围 | ≈360° |
+
+
+| 项目 | 4.8V 测试 | 6.0V 测试 |
+|-------------------|--------------------|--------------------|
+| 空载速度 | 70±5r/min | 90±5r/min |
+| 空载电流 | 70±20mA | 90±20mA |
+| 停止扭力 | 0.5±0.2 kg-cm | 0.7±0.2kg-cm |
+| 停止电流 | 0.8±0.1A | 0.9±0.1A |
+| 待机电流 | 7±1mA | 7±1 mA |
+| 空载寿命 | >50000 次 | >40000 次 |
+| 温飘(环境温度 25°C) | ≤1° | ≤1° |
+
+
+## 硬件连接
+
+此处以wukong扩展板为例。
+
+将舵机连接到扩展板的S1接口。
+
+
+
+## 添加专属扩展库
+
+在MakeCode的代码抽屉中点击“高级”,查看更多代码选项。
+
+
+
+为了给哪吒扩展板编程,我们需要添加一个扩展库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框,搜索“哪吒”,然后点击下载这个代码库。
+
+
+
+*注意:*如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
+
+
+### 如图所示编写程序
+
+
+
+
+### 参考程序
+
+请参考程序连接:[https://makecode.microbit.org/_ewhiK2hvfRX4](https://makecode.microbit.org/_ewhiK2hvfRX4)
+
+你也可以通过以下网页直接下载程序。
+
+
+
+
+
+### 结果
+
+按键A按下时舵机全速转动,当按键B按下时舵机停止转动。
+
+### 注意事项
+
+注意:当使用电机时,应该注意电机是否有堵转,如果电机堵转,可能有烧毁的风险。
+
+### 舵机注意事项
+
+当使用舵机时,应先调整舵机角度,并根据案例需求调整舵机角度进行验证,验证完成后再安装相应的结构件,防止出现堵转的情况而导致舵机烧毁。
+
+注意:当使用舵机时,应该注意舵机是否有堵转,如果舵机堵转,可能有烧毁的风险。
+
+注意:当使用舵机时,应注意舵机转动的动作后续是否需要添加延时,舵机转动需要时间执行,如果在舵机执行指令的过程中,出现新的舵机指令,会覆盖前一条舵机转动的指令,导致舵机转动不到位的情况。
diff --git a/docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09087.md b/docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09087.md
new file mode 100644
index 000000000..87fc1a92d
--- /dev/null
+++ b/docs/microbit/sensor/octopus-sensors/sensor/octopus_ef09087.md
@@ -0,0 +1,90 @@
+# 积木电机
+
+## 规格参数
+
+
+
+| 项目 | 规格 |
+| :-: | :-: |
+| SKU | EF09087 |
+| 使用环境条件 | |
+| 工作电压 | 3V |
+| 工作温度 | -10℃~50℃ |
+| 机械特性 | |
+| 机械极限角度 | 360° |
+| 重量 | 9 ± 1g |
+| 减速比 | 1/266 |
+| 齿轮虚位 | ≤1° |
+| 控制特性 | |
+| 操作角度 | 360° |
+| 选装方向 | 顺时针 |
+| 可动作角度范围 | 360° |
+
+
+| 项目(Item) | 3V 测试 |
+|------------------|------------------|
+| 空載速度 | 70±5r/min |
+| 空載电流 | 70±20mA |
+| 停止扭力 | 0.5±0.1 kg-cm |
+| 停止电流 | 0.8±0.1A |
+| 待机电流 | 7±1mA |
+| 空載寿命 | 大于 200 小时 |
+
+
+## 硬件连接
+
+此处以wukong扩展板为例。
+
+将电机连接到扩展板的M1接口。
+
+
+
+## 添加专属扩展库
+
+在MakeCode的代码抽屉中点击“高级”,查看更多代码选项。
+
+
+
+为了给哪吒扩展板编程,我们需要添加一个扩展库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框,搜索“哪吒”,然后点击下载这个代码库。
+
+
+
+*注意:*如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
+
+### 如图所示编写程序
+
+
+
+
+### 参考程序
+
+请参考程序连接:[https://makecode.microbit.org/_U3p38hgW2d33](https://makecode.microbit.org/_U3p38hgW2d33)
+
+你也可以通过以下网页直接下载程序,下载完成后即可开始运行程序。
+
+
+
+
+
+### 结果
+
+按键A按下时电机转动,当按键B按下时电机停止转动。
+
+### 注意事项
+
+注意:当使用电机时,应该注意电机是否有堵转,如果电机堵转,可能有烧毁的风险。
diff --git a/docs/microbit/sensor/planet-x-sensors/Plant_X_EF10154.md b/docs/microbit/sensor/planet-x-sensors/Plant_X_EF10154.md
new file mode 100644
index 000000000..42ba7e5ef
--- /dev/null
+++ b/docs/microbit/sensor/planet-x-sensors/Plant_X_EF10154.md
@@ -0,0 +1,102 @@
+# 红色积木电机
+
+
+
+
+
+## 规格参数
+
+| 项目 | 规格 |
+| :-: | :-: |
+| SKU | EF10154 |
+| 使用环境条件 | |
+| 工作电压 | 3V~5V |
+| 工作温度 | -10℃~50℃ |
+| 机械特性 | |
+| 机械极限角度 | 360° |
+| 重量 | 18 ± 1g |
+| 舵片规格 | 十字孔双输出(1 个乐高单位深) |
+| 减速比 | 1/140 |
+| 齿轮虚位 | ≤1° |
+| 控制特性 | |
+| 操作角度 | 360° |
+| 选装方向 | 顺时针 |
+| 可动作角度范围 | 360° |
+
+
+| 项目 | 3V 测试 | 5V 测试 |
+|------------------|--------------------|--------------------|
+| 空载速度 | 90±10r/r/min | 160±10r/r/min |
+| 空载电流 | 65±20mA | 80±20mA |
+| 停止扭力 | 0.5±0.1 kg-cm | 0.7±0.1 kg-cm |
+| 停止电流 | 0.70±0.2A | 1.1±0.2A |
+| 马达转速 | 12500±10% | 22000±10% |
+| 马达电流 | 小于 30 mA | 小于 40 mA |
+| 空载寿命 | 大于 100 小时 | 大于 50 小时 |
+
+
+## 硬件连接
+
+此处以哪吒扩展板为例。
+
+将两个电机分别连接到M1和M2接口。
+
+
+
+
+
+
+## 添加专属扩展库
+
+在MakeCode的代码抽屉中点击“高级”,查看更多代码选项。
+
+
+
+为了给哪吒扩展板编程,我们需要添加一个扩展库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框,搜索“哪吒”,然后点击下载这个代码库。
+
+
+
+*注意:*如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
+
+
+## 电机使用案例
+
+注意:当使用电机时,应该注意电机是否有堵转,如果电机堵转,可能有烧毁的风险。
+
+### 如图所示编写程序
+
+
+
+
+### 参考程序
+
+请参考程序连接:[https://makecode.microbit.org/_8g40hhK9rLvW](https://makecode.microbit.org/_8g40hhK9rLvW)
+
+你也可以通过以下网页直接下载程序,下载完成后即可开始运行程序。
+
+
+
+
+
+### 结果
+
+按键A按下时两个电机一起转动,当按键B按下时接在M1接口的电机停止转动,当按键A和B同时按下时两个电机同时停止转动。
+
+### 注意事项
+
+注意:当使用电机时,应该注意电机是否有堵转,如果电机堵转,可能有烧毁的风险。
diff --git a/docs/microbit/sensor/planet-x-sensors/Plant_X_EF10155.md b/docs/microbit/sensor/planet-x-sensors/Plant_X_EF10155.md
new file mode 100644
index 000000000..831f56b09
--- /dev/null
+++ b/docs/microbit/sensor/planet-x-sensors/Plant_X_EF10155.md
@@ -0,0 +1,110 @@
+# 灰色积木舵机
+
+
+
+## 规格参数
+
+| 项目 | 规格 |
+| :-: | :-: |
+| SKU | EF10155 |
+| 使用环境条件 | |
+| 工作电压 | 4.8V~6V |
+| 工作温度 | -10℃~50℃ |
+| 机械特性 | |
+| 机械极限角度 | 360° |
+| 重量 | 20± 1g |
+| 舵片规格 | 十字孔双输出(1 个乐高单位深) |
+| 减速比 | 1/300 |
+| 齿轮虚位 | ≤1° |
+| 控制特性 | |
+| 操作角度 | 360°±10°(在 500→2500 μsec) |
+| 二边角度差 | ≤10° |
+| 回中差 | ≤2° |
+| 中立位置 | 1500μsec |
+| 脉波信号虚位 | ≤4μsec |
+| 选装方向 | 顺时针 (1500→500μsec) |
+| 脉波宽度范围 | 500→2500 μsec |
+| 可动作角度范围 | 360°(在 500→2500 μsec) |
+
+
+| 项目 | 4.8V 测试 | 6.0V 测试 |
+|------------------|---------------------|---------------------|
+| 空载速度 | 0.14±0.01sec/60° | 0.12±0.01sec/60° |
+| 空载电流 | 70±20mA | 90±20mA |
+| 停止扭力 | 1.8±0.2 kg-cm | 2±0.2kg-cm |
+| 停止电流 | 0.8±0.1A | 0.9±0.1A |
+| 待机电流 | 7±1mA | 7±1 mA |
+| 空载寿命 | >50000 次 | >40000 次 |
+| 温飘(环境温度 25°C) | ≤1° | ≤1° |
+
+
+
+
+## 硬件连接
+
+此处以哪吒扩展板为例。
+
+将舵机连接到S1接口。
+
+
+
+
+## 添加专属扩展库
+
+在MakeCode的代码抽屉中点击“高级”,查看更多代码选项。
+
+
+
+为了给哪吒扩展板编程,我们需要添加一个扩展库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框,搜索“哪吒”,然后点击下载这个代码库。
+
+
+
+*注意:*如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
+
+
+
+
+### 如图所示编写程序
+
+
+
+
+
+### 参考程序
+
+请参考程序连接:[https://makecode.microbit.org/_FfMWV4cfpUTX](https://makecode.microbit.org/_FfMWV4cfpUTX)
+
+你也可以通过以下网页直接下载程序,下载完成后即可开始运行程序。
+
+
+
+
+
+
+
+### 结果
+
+按键A按下时360°舵机转动到0°,按键B按下时360°舵机转动到360°。
+
+### 舵机注意事项
+
+当使用舵机时,应先调整舵机角度,并根据案例需求调整舵机角度进行验证,验证完成后再安装相应的结构件,防止出现堵转的情况而导致舵机烧毁。
+
+注意:当使用舵机时,应该注意舵机是否有堵转,如果舵机堵转,可能有烧毁的风险。
+
+注意:当使用舵机时,应注意舵机转动的动作后续是否需要添加延时,舵机转动需要时间执行,如果在舵机执行指令的过程中,出现新的舵机指令,会覆盖前一条舵机转动的指令,导致舵机转动不到位的情况。
diff --git a/docs/microbit/sensor/servo-and-motor/servo-and-motor-product-specification.md b/docs/microbit/sensor/servo-and-motor/servo-and-motor-product-specification.md
deleted file mode 100644
index 828f3004e..000000000
--- a/docs/microbit/sensor/servo-and-motor/servo-and-motor-product-specification.md
+++ /dev/null
@@ -1,186 +0,0 @@
-# 舵机和电机的规格参数
-
-
-## 适用于行星系列
-### 灰色积木舵机
-
-
-
-| 项目 | 规格 |
-| :-: | :-: |
-| SKU | EF10155 |
-| 使用环境条件 | |
-| 工作电压 | 4.8V~6V |
-| 工作温度 | -10℃~50℃ |
-| 机械特性 | |
-| 机械极限角度 | 360° |
-| 重量 | 20± 1g |
-| 舵片规格 | 十字孔双输出(1 个乐高单位深) |
-| 减速比 | 1/300 |
-| 齿轮虚位 | ≤1° |
-| 控制特性 | |
-| 操作角度 | 360°±10°(在 500→2500 μsec) |
-| 二边角度差 | ≤10° |
-| 回中差 | ≤2° |
-| 中立位置 | 1500μsec |
-| 脉波信号虚位 | ≤4μsec |
-| 选装方向 | 顺时针 (1500→500μsec) |
-| 脉波宽度范围 | 500→2500 μsec |
-| 可动作角度范围 | 360°(在 500→2500 μsec) |
-
-
-| 项目 | 4.8V 测试 | 6.0V 测试 |
-|------------------|---------------------|---------------------|
-| 空载速度 | 0.14±0.01sec/60° | 0.12±0.01sec/60° |
-| 空载电流 | 70±20mA | 90±20mA |
-| 停止扭力 | 1.8±0.2 kg-cm | 2±0.2kg-cm |
-| 停止电流 | 0.8±0.1A | 0.9±0.1A |
-| 待机电流 | 7±1mA | 7±1 mA |
-| 空载寿命 | >50000 次 | >40000 次 |
-| 温飘(环境温度 25°C) | ≤1° | ≤1° |
-
-### 红色积木电机
-
-
-
-| 项目 | 规格 |
-| :-: | :-: |
-| SKU | EF10154 |
-| 使用环境条件 | |
-| 工作电压 | 3V |
-| 工作温度 | -10℃~50℃ |
-| 机械特性 | |
-| 机械极限角度 | 360° |
-| 重量 | 18 ± 1g |
-| 舵片规格 | 十字孔双输出(1 个乐高单位深) |
-| 减速比 | 1/140 |
-| 齿轮虚位 | ≤1° |
-| 控制特性 | |
-| 操作角度 | 360° |
-| 选装方向 | 顺时针 |
-| 可动作角度范围 | 360° |
-
-
-| 项目 | 3V 测试 | 5V 测试 |
-|------------------|--------------------|--------------------|
-| 空载速度 | 90±10r/r/min | 160±10r/r/min |
-| 空载电流 | 65±20mA | 80±20mA |
-| 停止扭力 | 0.5±0.1 kg-cm | 0.7±0.1 kg-cm |
-| 停止电流 | 0.70±0.2A | 1.1±0.2A |
-| 马达转速 | 12500±10% | 22000±10% |
-| 马达电流 | 小于 30 mA | 小于 40 mA |
-| 空载寿命 | 大于 100 小时 | 大于 50 小时 |
-
-
-## 适用于八爪鱼系列
-
-### 360° 9g积木舵机
-
-
-
-| 项目 | 规格 |
-| :-: | :-: |
-| SKU | EF09086 |
-| 使用环境条件 | |
-| 工作电压 | 4.8~6V |
-| 工作温度 | -10℃~50℃ |
-| 机械特性 | |
-| 机械极限角度 | 360° |
-| 重量 | 9 ± 1g |
-| 减速比 | 1/266 |
-| 齿轮虚位 | ≤1° |
-| 控制特性 | |
-| 操作角度 | 360° |
-| 选装方向 | 顺时针 |
-| 可动作角度范围 | ≈360° |
-
-
-| 项目 | 4.8V 测试 | 6.0V 测试 |
-|-------------------|--------------------|--------------------|
-| 空载速度 | 70±5r/min | 90±5r/min |
-| 空载电流 | 70±20mA | 90±20mA |
-| 停止扭力 | 0.5±0.2 kg-cm | 0.7±0.2kg-cm |
-| 停止电流 | 0.8±0.1A | 0.9±0.1A |
-| 待机电流 | 7±1mA | 7±1 mA |
-| 空载寿命 | >50000 次 | >40000 次 |
-| 温飘(环境温度 25°C) | ≤1° | ≤1° |
-
-
-### 积木电机
-
-
-
-| 项目 | 规格 |
-| :-: | :-: |
-| SKU | EF09087 |
-| 使用环境条件 | |
-| 工作电压 | 3V |
-| 工作温度 | -10℃~50℃ |
-| 机械特性 | |
-| 机械极限角度 | 360° |
-| 重量 | 9 ± 1g |
-| 减速比 | 1/266 |
-| 齿轮虚位 | ≤1° |
-| 控制特性 | |
-| 操作角度 | 360° |
-| 选装方向 | 顺时针 |
-| 可动作角度范围 | 360° |
-
-
-| 项目(Item) | 3V 测试 |
-|------------------|------------------|
-| 空載速度 | 70±5r/min |
-| 空載电流 | 70±20mA |
-| 停止扭力 | 0.5±0.1 kg-cm |
-| 停止电流 | 0.8±0.1A |
-| 待机电流 | 7±1mA |
-| 空載寿命 | 大于 200 小时 |
-
-### 360° 9g舵机
-
-
-
-| 项目 | 规格 |
-| :-: | :-: |
-| SKU | EF09081 |
-| 使用环境条件 | |
-| 工作电压 | 3.3~5V |
-| 工作温度 | -25°C~70°C |
-| 机械特性 | |
-| 机械极限角度 | 360° |
-| 重量 | 10g±5% |
-
-
-| 项目 | 3.3V 测试 | 5.0V 测试 |
-|-------------------|--------------------|--------------------|
-| 静态电流 | 5mA | 5mA |
-| 空载转速 | 76RPM | 120RPM |
-| 空载电流 | 90mA | 90mA |
-| 堵转扭矩 | 1.3kg.cm | 1.6kg.cm |
-| 堵转电流 | 400mA±10% | 750mA±10% |
-
-### 180° 9g舵机
-
-
-
-| 项目 | 规格 |
-| :-: | :-: |
-| SKU | EF09082 |
-| 使用环境条件 | |
-| 工作电压 | 4.8~6V |
-| 工作温度 | -25°C~70°C |
-| 机械特性 | |
-| 机械极限角度 | 200°±5° |
-| 重量 | 10g±5% |
-| 控制特性 | |
-| 操作角度 | 180°±3°(500~2500μsec) |
-| 选装方向 | 顺时针 |
-| 死区宽度 | 5 μsec |
-
-| 工作电压 | 4.8V | 6.0V |
-|-------------------|----------------|----------------|
-| 静态电流 | 5mA | 5mA |
-| 空载转速 | 0.11sec/60° | 0.09sec/60° |
-| 空载电流 | 90mA | 200mA |
-| 堵转扭矩 | 1.3kg.cm | 1.8kg.cm |
-| 堵转电流 | 500-750mA±10% | 500-750mA±10% |